小小的AGV何以能拖动成百上千公斤的重物运行,并能达到毫米级别的精度,这与AGV的轮边驱动模式密切相关。
AGV的轮边驱动主要分为差速和舵轮两种结构方式,由于原理不同,所以这两种结构方式各有利弊,简单点来说就是差速驱动能耗较高,但价格较低,适合百公斤负载的AGV使用,而舵轮型能耗低,承压更高,适合重负载,即过吨级别的AGV、叉车使用。
1
差速的结构方式,可以参考汽车,即动力驱动行星轮架,再由行星齿轮带动左、右两条驱动半轴,分别驱动左、右车轮。当车子直行时,左、右车轮与行星轮架三者的转速相等,处于平行状态。
当转弯时,由于外侧轮有滑拖的现象,内侧轮有滑转的现象,两个驱动轮此时就会产生两个方向相反的附加力,导致两边车轮的转速不同,并通过半油反映到半轴齿轮上,迫使行星齿轮产生自转,使外侧半轴转速加快,内侧半轴转速减慢,从而实现两边车轮转速的差异。
之前市面上主要采用平行轴结构的方式,但是平行轴结构的体积较大,而且精度不够,后来逐渐被行星结构代替。例如中大力德、恒翼通、来福谐波、海尚集团等都有此类产品。
来福谐波所研发的AGV用轮胎部减速机,其优点是体积小、结构紧凑,拥有两级减速,能更好的电机扭矩,拥有高刚性、大比数、低噪音值,已经在测试之中。
来福AGV用行星减速机
海尚“差速轮毂驱动模组”,以海尚“矢量摆线减速机”为核心,轮毂采用与高端汽车轮毂相同牌号的铝合金及低压铸造,用进口聚氨酯材料包胶,经过缜密的设计验算和计算机仿真分析,以及严苛的场地10万公里实际验证,具有性能可靠、方便安装、便于维护等特点,同时尽可能满足客户的应用需求,在轻量化、高承载、大扭矩、高速度等方面为客户提供可靠方案。
2
舵轮型是指集成了驱动电机、转向电机、减速机等一体化的机械结构,相比于差速结构方式,舵轮集成化高,适配性强,配合控制器和低压伺服驱动器,可快速部署各类AGV、物流车等。
舵轮通过跟车体作相对运动来控制转向,所以在安装了2个及2个以上舵轮的情况下,车子可以沿任意方向直行,也就是平移,所以安装了两个舵轮的AGV可以通过*狭小的空间,这点是差速方式所不具备的。
还有一点就是耗能,差速的结构方式会浪费一部分的能耗,随着负载的不断增加,能耗的损失就会越来越大,这也是为什么舵轮比差速更适合重负载型的物流车原因。
舵轮型的市面上主要有行星、摆线、少齿差、平行轴等几种结构方式,各有各的优缺点。

3
除此之外,麦克纳姆轮有作为一种特立独行的驱动方式也慢慢崭露头角。
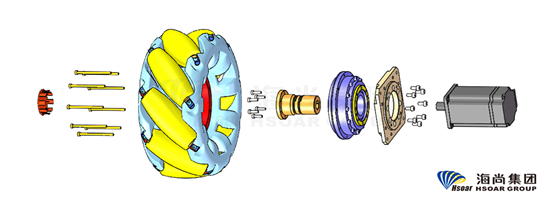
麦克纳姆轮,早由瑞典人BengtIlon于1973年,在名为Mecanum的公司发明,它由若干个可自由转动的小辊子,均匀固定在车轮外圆柱面上,小辊子轴线与车轮轴线的夹角通常为45°,小辊子的母线很特殊,当轮子绕着车轮轴转动时,各个小辊子的包络线为圆柱面,所以车轮能够连续地向前滚动。
相比于其他的驱动方式,麦轮的精度更高,但是其技术难度、加工、使用环境、成本也都较高,所以配有麦克纳姆轮的减速机厂家目前市面上并不多,例如纳博特斯克、海尚集团、汇聚自动化等。
这其中,纳博特斯克应该是家也是一家能够使用RV减速机配套生产,(如果业内有哪位同仁做出来,烦请告知),其余的厂家大部分采用行星结构,如汇聚自动化。
海尚一体式麦克纳姆轮AGV轮毂驱动模组
海尚一体式麦克纳姆轮AGV轮毂驱动模组,用的是自己研发的矢量摆线减速机,轮毂采用五轴加工整体加工成型,同时轮毂螺孔内嵌不锈钢自攻螺套,保证负载可靠的同时,避免了螺纹滑牙的担忧,同时安装和维护成本极低,小辊子设计采用了便于快速拆装的结构,无需拆下整个车轮,即可快速完成拆装。
综上,行星减速机由于其结构比较紧凑,回程间隙小、精度较高,使用寿很长,额定输出扭矩大的原因,在AGV上的使用高于其他品类的减速机。(欢迎企业技术人员“拍砖”)
邮箱:15236061639@163.com
QQ:60298351
微信:a18137798589

"十五五"时期是我国推进新型工业化、建设制造强国的关键攻坚期,制造业发展正式迈入

它是国内工业机器人领域首家A+H双上市平台,连续8年国产机器人出货第一,2025年10.6%市占率超

机器人行业这几年最容易制造错觉的一点,是把所有赛道都说成同一种“高科技难题”。但对做过机构、传动、精

















