硬核科普:工业机器人的结构和原理
2021年9月6日 来源:工业机器人 浏览 651 次 评论(0)
工业机器人已经渗透到各行各业,帮助人们完成焊接、搬运、喷涂、冲压等各项任务,那么你有思考过机器人是怎么做到这一些的吗?它的内部结构又是怎样的呢?今天我们就通过一段动画视频,带大家了解工业机器人的结构和原理。
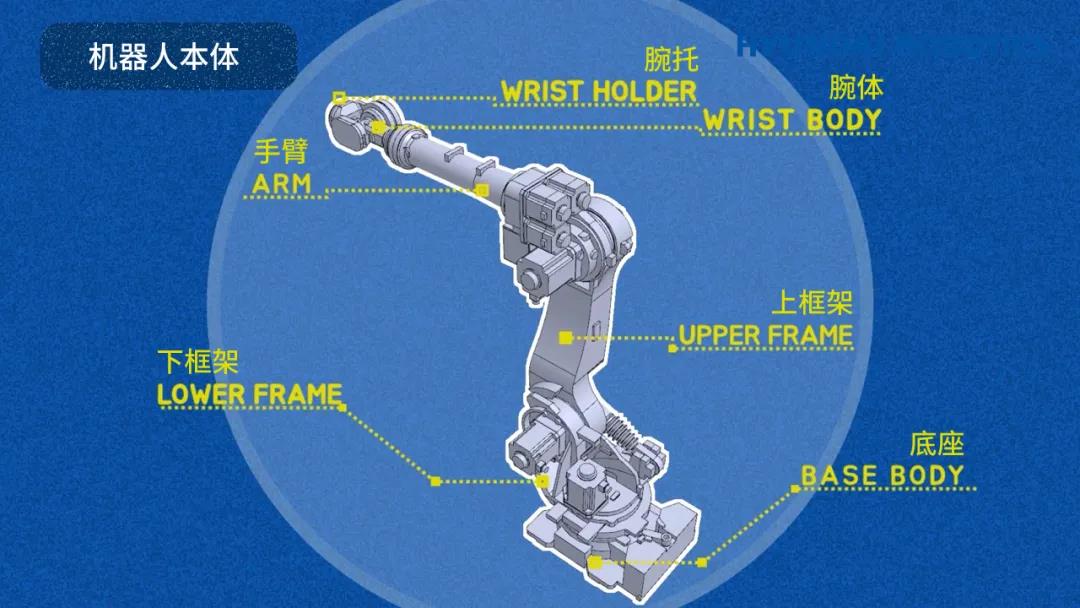
机器人可以分为硬件部分和软件部分,硬件部分主要包括本体和控制器,而软件部分主要指的是它的控制技术。 部分先来说下机器人的本体部分。工业机器人是仿照人的手臂来进行设计的。我们以现代机器人HS220型号为例,从外观来看,主要有底座、下框架、上框架、手臂、腕体、腕托等六个部分。机器人的各个关节就和人类的肌肉一样,靠伺服电机和减速器来控制移动。伺服电机是动力的来源,机器人的运行速度以及负载重量如何,都和伺服电机有关。而减速器则是动力传输的中介,它拥有许多不同的尺寸。一般对于微型机器人来说,要求的重复精度都很高,一般在0.001英寸或0.0254毫米以下。伺服电机与减速器相连,可以帮助提高精度,提高减速器的传动比。
部分先来说下机器人的本体部分。工业机器人是仿照人的手臂来进行设计的。我们以现代机器人HS220型号为例,从外观来看,主要有底座、下框架、上框架、手臂、腕体、腕托等六个部分。机器人的各个关节就和人类的肌肉一样,靠伺服电机和减速器来控制移动。伺服电机是动力的来源,机器人的运行速度以及负载重量如何,都和伺服电机有关。而减速器则是动力传输的中介,它拥有许多不同的尺寸。一般对于微型机器人来说,要求的重复精度都很高,一般在0.001英寸或0.0254毫米以下。伺服电机与减速器相连,可以帮助提高精度,提高减速器的传动比。
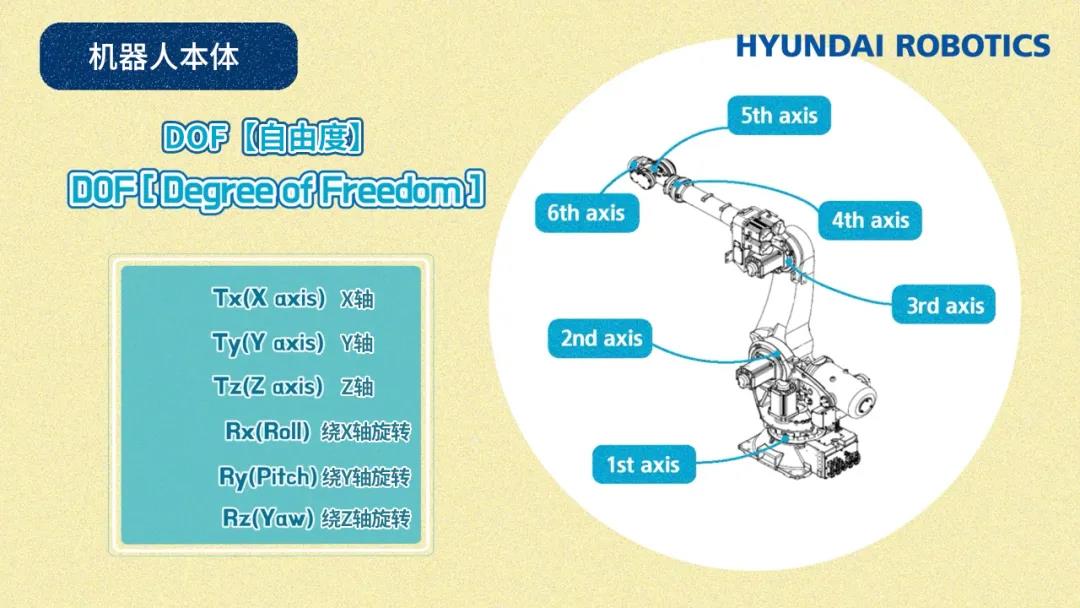
HS220拥有6个伺服电机和减速器,它们安装在每一个连接的接头上,使机器人可以向六个方向进行移动,也就是我们所说的六轴机器人。这六个方向分别是X轴-前后,Y轴-左右,Z轴-上下,RX-绕X轴旋转,RY-绕Y轴旋转,RZ-绕Z轴旋转。正是这种拥有多个维度移动的能力,机器人才可以摆出不同的姿势,完成各项任务。

机器人的控制器相当于机器人的大脑,它参与的是计算发送指令和能量供应的整个过程,它根据指令以及传感器信息控制机器人完成一定的动作或作业任务,是决定机器人功能和性能的主要因素。
机器人的控制技术,指的是快速准确地操作机器人应用的一个领域。机器人的一大优点就是它的程序可以很容易修改,这一点可以让他们在不同的场景切换使用。为了能够使人们操控机器人,就必须依靠示教器来进行。在示教器的显示界面上,我们可以看到机器人的编程语言HR Basic以及机器人的各项状态。我们可以通过示教器来完成机器人的编程。控制技术的第二个部分是通过绘制表格,然后根据图表来控制机器人的运动。我们可以使用计算出的力学数据来完成对机器人的规划和动作控制。此外,机器视觉,以及最近热门的人工智能沉浸式深度学习及分类等这些,都是属于控制技术的范畴。现代机器人也有专门的研发团队,来研究机器人的控制技术。除此之外,我们也有机械系统研发团队来负责机器人的本体,控制平台团队负责控制器,以及应用控制团队负责控制技术。正是多个部门的团结协作,才组成了如今的现代机器人。预告一下,接下来几期我们还会分别介绍工业机器人以及协作机器人的相关知识,大家不要错过哦!