GGII数据显示,2018年下半年虽然工业机器人市场整体“遇冷”,但中国协作机器人市场全年销量依然取得近50%的增速,大大高于中国工业机器人市场整体增速。
而在2019上半年本体企业推出的众多新品中,协作机器人依然是的亮点,目前行业落地依然不明朗、且先行者Rethink已经倒下,在这种情况下协作概念却还是拥趸众多。
这表明“协作机器人”已经从概念到深入人心,并逐渐成为各机器人厂商争相布局的战略产品。
珞石机器人联合创始人、柔性协作机器xMate的主创人员韩峰涛从技术路线的角度将其归纳为四种流派,但万变不离其宗,产品性能才是决定技术有效性的途径。
本次选取国外协作机器人的产品参数进行对比(产品参数均来自官网和产品手册),作为协作机器人所必备的协作能力即力矩反馈与视觉测控,文章无法进行测评。
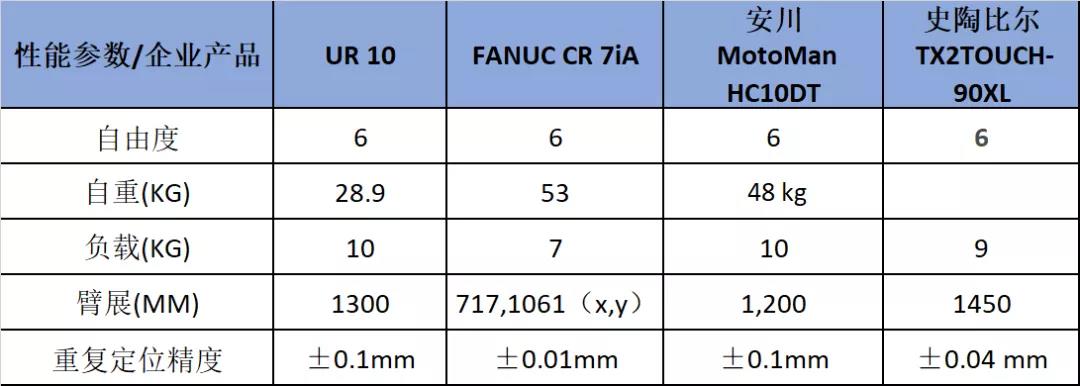
目前市面上常见的种技术路线是基于传统机器人改造,此方案在2001年到2006年较多出现。此方案优点是基于现有机型,负载、臂展选择余地大,探测手段可选种类多;缺点是自重大导致速度必须很慢,旧产品设计思路与协作不符,改造成本高,人机界面不适合等。代表厂家:安川、发那科、史陶比尔等。
第二种技术路线,是成本/性能达到较好平衡的协作机器人产品。此方案了对速度、精度的要求,实际可以把它看成是比较的传统机器人的变种,更轻量化、更,成本更低一些;缺点是在价格、易用性、柔性、性上仍存在很多问题。
先从自重与负载来看,UR的负载,自重小。协作机器人由于要做到柔性化生产,自重更轻就更能满足产线的不断更替,做到即插即用,即搬即走,第二种技术路线*做得更好。
但是在重复定位精度方面,走第二种技术路线的UR就落后于种技术路线的发那科与史陶比尔。发那科特有的刀片补偿功能,使得机器人在精加工切割的过程中可以实现一圈一圈往里边走,而安川的机器人本体本身不具备这个功能,所以显得精度会稍显逊色。
臂展主要和自由度有关系,可以看出同为6个自由度,史陶比尔,其次是UR,后是发那科。
种技术路线的协作机器人,基本上保持了其原有的工业机器人的作风,安川的稳定、史陶比尔的高速高精度、发那科的高精度等。
第三种技术路线,以 ABB为代表,厂家极少。是指在没有增加额外传感器的情况下,达到了比现在机器人更好的性和动力学控制的效果。此方案优点是相对成本低,运动速度较快;缺点是非中空电机和传动,内部走线复杂,设计原理决定了无法做大负载机型。
所以负载都是0.5KG。
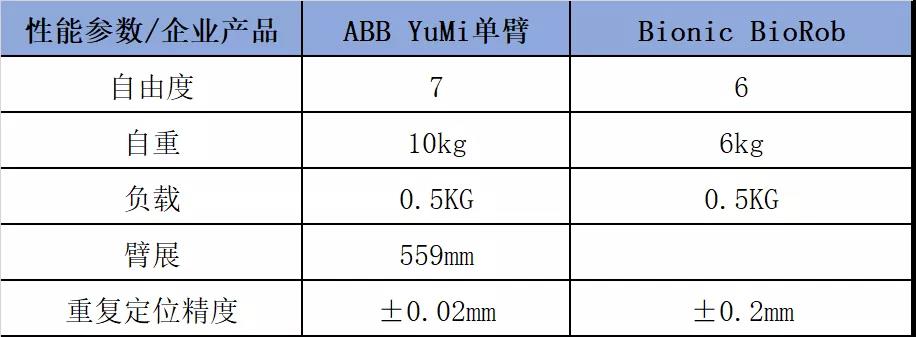
这种方案对于机器人的建模控制、生产一致性,从初的软件到后的生产都有*高的要求,ABB早是从变频器开始做起的,其核心优势就是运动控制。
ABB明星产品YuMi单臂7轴无冗余设计,双臂14轴,加上机身小巧,重量轻,*灵活,而且ABB更加强调机器人本身的整体性,联动起来运动速度快、精准度高。
但是与一般的ABB机器人不同的是,Yumi的许多硬件都经过了紧凑化开发,因此维护起来难度较大,如果出现了硬件故障的话较为麻烦。
第四种技术路线,以库卡iiwa机器人和已经倒闭的Rethink为代表,用于太空机械臂。是一种基于传感器加上各种柔性结构的方案,处于仿生道路上的中间版本,此方案优点是直接力控制,可实现高动态力控,高灵敏拖动示教/碰撞;缺点是结构和控制技术复杂,部件成本高,传感器多,需要较多校正。
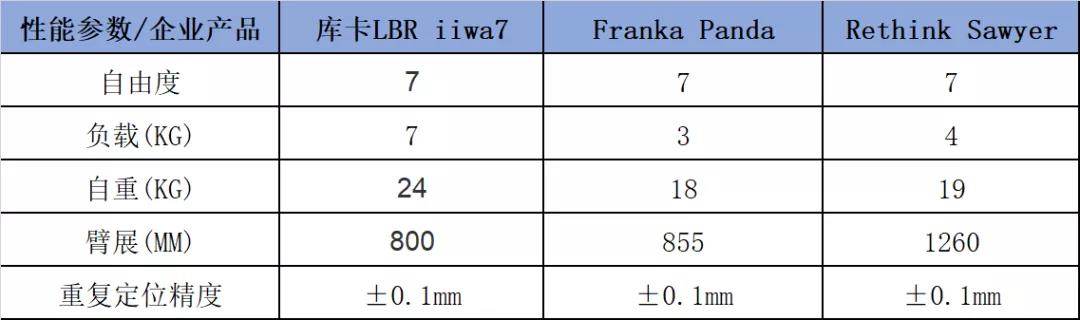
更加的贴合人的手臂,所以都是7个自由度,其他的参数也相差不多,但是这种技术路径的典型特征就是“贵”。之前库卡已经在市场上推广了,只不过成本比较高,所以没有推广开。而Rethink也已经倒闭,技术被中德企业消化再吸收。
综合来看,目前的协作机器人技术与市场呈现百花齐放状态,企业都处于探索技术与市场落地阶段,而对人机协作关重要的拖动示教、碰撞等技术也在不断发展,可以预见,当技术与场景突破后,协作机器人完全有可能实现低成本的简易、部署,迎来春天。
值得一提的是,2019年9月17日下午13:30,上海会展M8-03会议室,高工机器人将与节卡机器人一起发布《协作机器人行业发展蓝皮书》,分享行业先进技术与案例,诚邀您共同见证协作机器人又一重要时刻!
邮箱:15236061639@163.com
QQ:60298351
微信:a18137798589

在江西南昌的一家智能终端工厂里,人形机器人正与传统产线并肩工作,它们灵巧地完成着装配、检测、搬运等任

在机械工程领域深耕十余年,见证了手术机器人从实验室走向临床,也见证了人形机器人从笨拙的演示品进化为具

人形机器人产业链当前已形成明确价值分层,优先推荐掌握核心技术、订单确定性高的龙头企业,以下结合产

















