近日,中国科学院沈阳自动化研究所智能腔镜手术机器人研究组在连续体机器人形状感知方面研究取得新进展。
相关成果发表在机器人领域期IEEE Robotics and Automation Letters上。
连续体机器人和软体机器人具有高灵巧性和顺应性的特点,在医疗领域中展现出巨大的应用潜力,然而连续体机器人的形状反馈的缺失制约了其进一步应用。连续体机器人的形状感知是实现闭环控制的前提,将有助于提高机器人的控制精度并促进连续体机器人的智能化应用。
该研究提出了一种新颖的连续体机器人形状感知方法,通过在连续体机器人内部增加被动腱,将连续体机器人的形状变化转换成被动腱的位移信息,并通过相机实时获得被动腱的位移,进而基于几何运动旋量重建出连续体机器人的空间三维形状。这一方法不仅能够获得连续体机器人的曲率、挠率等信息,也能够感知连续体机器人的扭转变形,相较于其它方法具有低成本和高可靠性优点。
沈阳自动化所智能腔镜手术机器人研究组长期专注于消化、腹腔、呼吸等人体腔道微手术机器人的关键技术及系统研发,先后承担了国家重点研发计划项目、国家自然科学基金区域联合重点项目等,在灵巧型手术机器人的构型创成、感知、控制以及手术导航等方面的研究取得了多项突破成果,形成了特色和优势,已完成多台套的典型手术机器人系统,部分成果已经进入临床应用阶段。
该研究得到国家自然科学基金、国家重点研发计划项目、辽宁省自然科学基金和沈阳医工结合协同创新项目的支持。
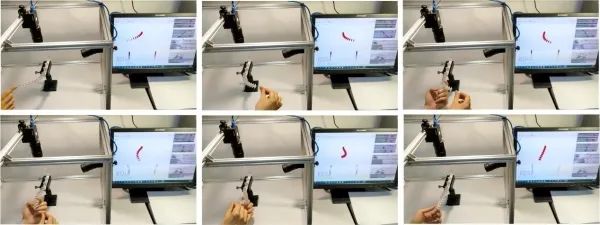
基于被动腱的连续体机器人实时形状感知
邮箱:15236061639@163.com
QQ:60298351
微信:a18137798589

提到机器人,很多人首先想到的是工厂里的机械臂,或者像人一样行走、工作的“人形机器人”。虽然外形差异很

绳驱灵巧手的高自由度、轻量化与柔顺控制,三者都依赖于一条持续处于适度张紧状态的腱绳。腱绳一旦松弛,打

"十五五"时期是我国推进新型工业化、建设制造强国的关键攻坚期,制造业发展正式迈入

















