数控机床电气设计、应用与维修技术工作的复杂性、多样性和多变性以及一些客观环境因素的制约,在数控机床电气维修技术方面还没有形成一套成熟的、完整的理论体系。控制理论与自动化技术的高速发展,是微电子技术和计算机技术的日新月异,使数控技术也在同步飞速发展,数控系统结构形式上的PC基、开放化和性能上的多样化、复杂化、高智能化不仅给其应用从观念到实践带来了巨大变化。
一、数控技术
谈到维修,首先必须从总体上了解我们的维修对象。
1. 数控机床电气控制系统综述
一台典型的数控机床其全部的电气控制系统如图1所示。
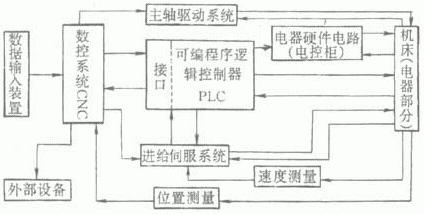
图1 数控机床电气控制系统
(1) 数据输入装置将指令信息和各种应用数据输入数控系统的必要装置。它可以是穿孔带阅读机,3.5in软盘驱动器,CNC键盘,数控系统配备的硬盘及驱动装置、磁带机、PC计算机等等。
(2) 数控系统数控机床的中枢,它将接到的全部功能指令进行解码、运算,然后有序地发出各种需要的运动指令和各种机床功能的控制指令,直运动和功能结束。
(3) 可编程逻辑控制器是机床各项功能的逻辑控制。它将来自CNC的各种运动及功能指令进行逻辑排序,使它们能够准确地、协调有序地运行,实现对整个机床的控制。
(4) 主轴驱动系统接受来自CNC的驱动指令,经速度与转矩调节输出驱动信号驱动主电动机转动,同时接受速度反馈实施速度闭环控制。
(5) 进给伺服系统速度调节器的正确调节是重要的,应该在位置开环的条件下作化调节,既不过冲又要保持一定的硬特性。
(6) 电器硬件电路随着PLC功能的不断强大,电器硬件电路主要任务是电源的生成与控制电路、隔离继电器部分及各类执行电器,很少还有继电器逻辑电路的存在。
(7) 机床包括所有的电动机、电磁阀、制动器、各种开关等。它们是实现机床动作的执行者和机床各种现实状态的报告员。
(8) 速度测量通常由集装于主轴和进给电动机中的测速机来完成。它将电动机实际转速匹配成电压值送回伺服驱动系统作为速度反馈信号。
(9) 位置测量较早期的机床使用直线或圆形同步感应器或者旋转变压器,而现代机床多采用光栅尺和数字脉冲编码器作为位置测量元件。
(10) 外部设备一般指PC计算机、打印机等输出设备,多数不属于机床的基本配置。使用中的主要问题与输入装置一样,是匹配问题。
2. 数控机床运动坐标的电气控制
数控机床一个运动坐标的电气控制由电流(转矩)控制环、速度控制环和位置控制环串联组成。其控制框图如图2。
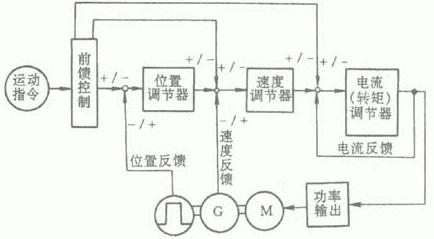
图2 运动坐标电气控制系统
(1) 电流环是为伺服电机提供转矩的电路。一般情况下它与电动机的匹配调节已由制造者作好了或者指定了相应的匹配参数,其反馈信号也在伺服系统内联接完成,因此不需接线与调整。
(2) 速度环是控制电动机转速亦即坐标轴运行速度的电路。速度调节器是比例积分(PI)调节器,其P、I调整值完全取决于所驱动坐标轴的负载大小和机械传动系统的传动刚度与传动间隙等机械特性。
(3) 位置环是控制各坐标轴按指令位置定位的控制环节。位置环将终影响坐标轴的位置精度及工作精度。
邮箱:15236061639@163.com
QQ:60298351
微信:a18137798589

做机器人结构有限元仿真,可以参考的标准并不是一份单一的成文规范,而是分层分布在国家标准化管理委员会、

从事高校实验室数字化落地多年,接触过数百位实验室主任、安全管理员,听到最多的吐槽高度统一:台账靠手工

2026年上半年人形机器人行业在政策引导、技术落地、商业化量产等多个维度实现了关键新突破,行业正式迈

















